
Immersive experiences driven by motion tracking systems for Virtual and Augmented Reality are becoming more popular, and due to this growing trend several kind of technologies to develop these systems are emerging, one of most popular of those are based on electromagnetism, which are called Electromagnetic Motion Tracking. But how does it work? What kind of tracking technologies exist? What are the advantages and drawbacks of every one? Where are motions tracking systems used? These questions are addressed in our blog and will be reviewed in this post.
What is Electromagnetic Motion Tracking?
Electromagnetic motion tracking, as its name indicates, is an electromagnetism-based tracking technology.
Motion tracking is a technology which allows a moving object to be followed and after transfer the data gathered to be processed. For example, a digital avatar could render our movements.

Following the example of the digital avatar, the role played by the electromagnetism here is a vehicle which drives the information from our body to the system that represents our avatar and move it depending on our body movement. You can read the full article here.
![]()
EM tracking systems are based on two main elements: transmitters and sensors.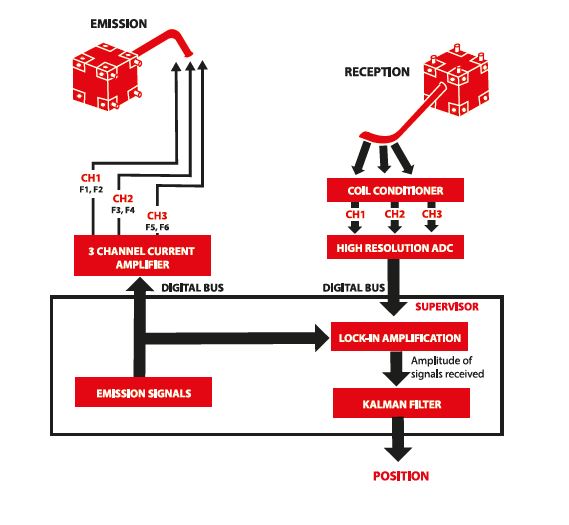
Transmitter
The transmitter is an antenna, normally fixed in a position, in charge of generating a magnetic field in the three spatial directions. For this reason, manufacturers of transmitters typically use three antennas, one for each spatial direction.

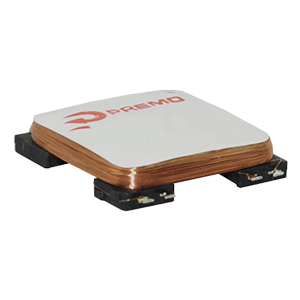
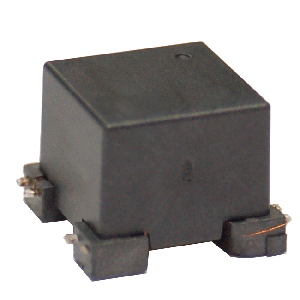
Instead, Premo has developed 3D emitter devices called 3DCoilCubesTM which can generate an isotropic magnetic field using only one of them.

Sensor
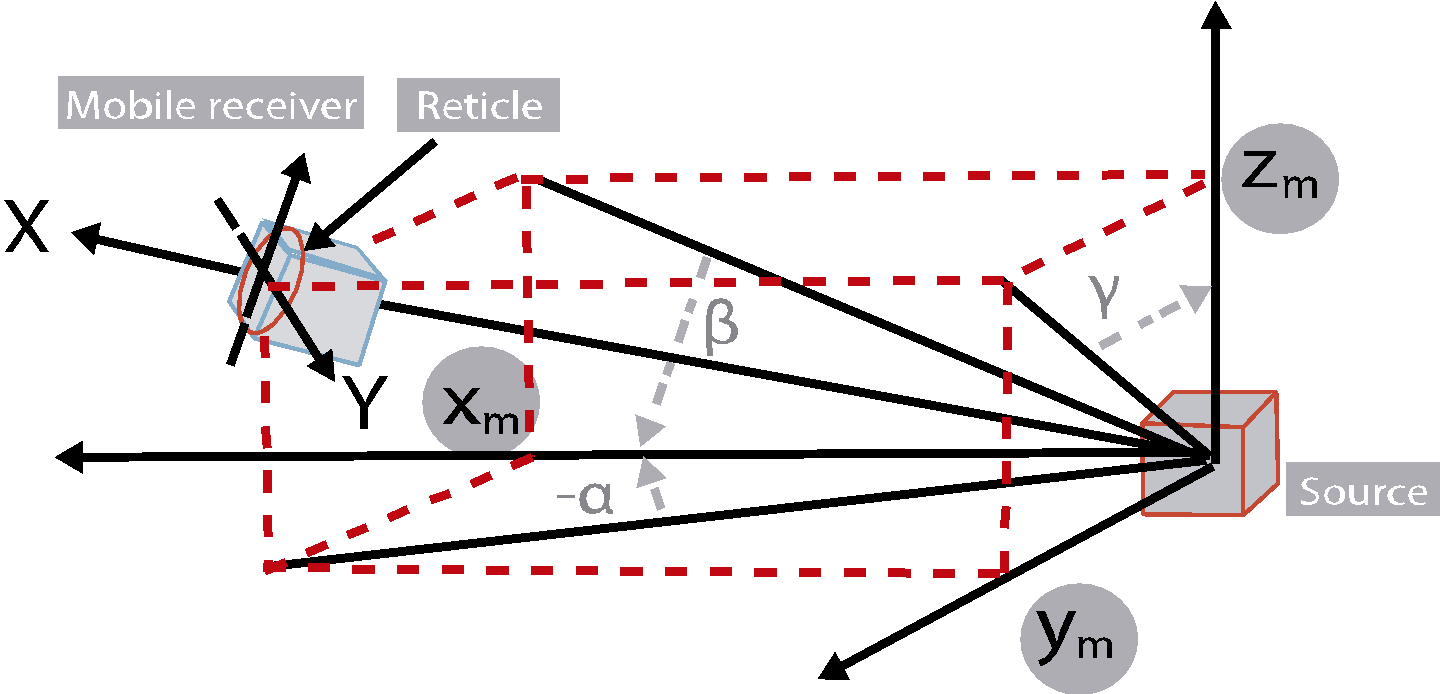
Sensors are devices usually built-in in the device to be tracked, i.e., the device whose position we want to know . These sensors acquire the value of the magnetic field in the three spatial directions, so that, position and orientation can be known.
Premo 3DCoilCubesTM and 3DCoilsTM are the perfect devices for this purpose, since they consist of windings in the three spatial directions to acquire data from the emitter antenna, allowing the position and orientation to be known with a good performance.
In other words, EM tracking systems use as spatial reference an electromagnetic field generated by an emitter antenna. Sensors measure the magnetic field strength by means of attenuation and level of the signal in each axis, so that orientation and movement can be known using a simple analytic method consist on getting the direction vector according to the voltage levels for each axis of the sensor.
Comparing EM, IMU and Visual Tracking Systems
We talked about EM tracking systems and how these works, but there are other tracking technologies available in the market. This is good from the point of view of the designer, since they can compare and choose the solution that is best fits their requirements. Several tracking technologies are shown below and they are compared to EM to know their advantages and drawbacks.
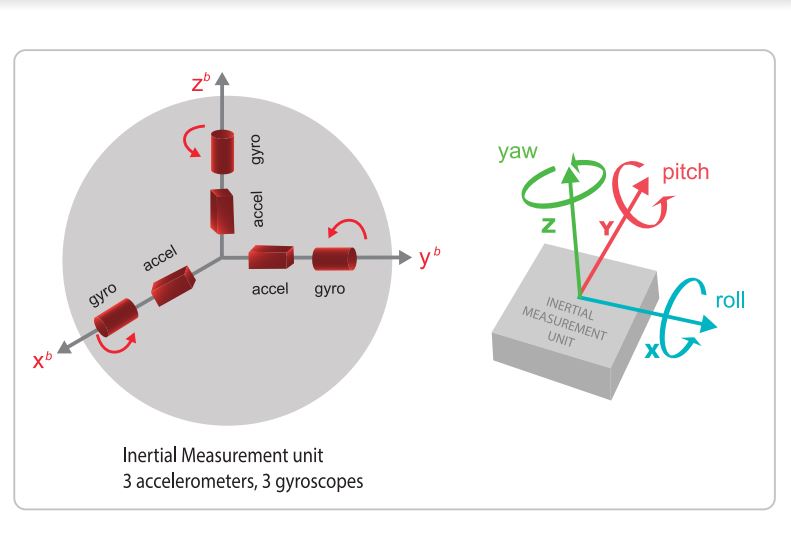
IMU (Inertial Measurement Unit)
The tracking technology based on IMU works using the current position and estimating the new one by mean of speed and acceleration data, i.e., in analytic way.
IMU is an electronic device that measures linear and angular motion by mean of a triad of accelerometers and a triad of gyroscopes, which are orthogonal between them, since each couple is composed of an accelerometer and a gyroscope, and is orthogonal to the other two couples.
This technology allows acceleration and speed data to be gathered to be processed from accelerometers and gyroscopes.
These devices are widely used in aircrafts, aerospace industry, guided missiles on board of ships, among others. The technique used to know the position and orientation in this kind of systems is called Dead Reckoning. This is a mathematic method which uses trigonometric to know the current position, but it should consider the accumulated error to be corrected.
![]()
Video/Optical
Video tracking is typically defined as the process to locate the position of a target by means of cameras; cameras must take frames from the target continuously, so every frame is analyzed to detect the object to be tracked and to know its position.
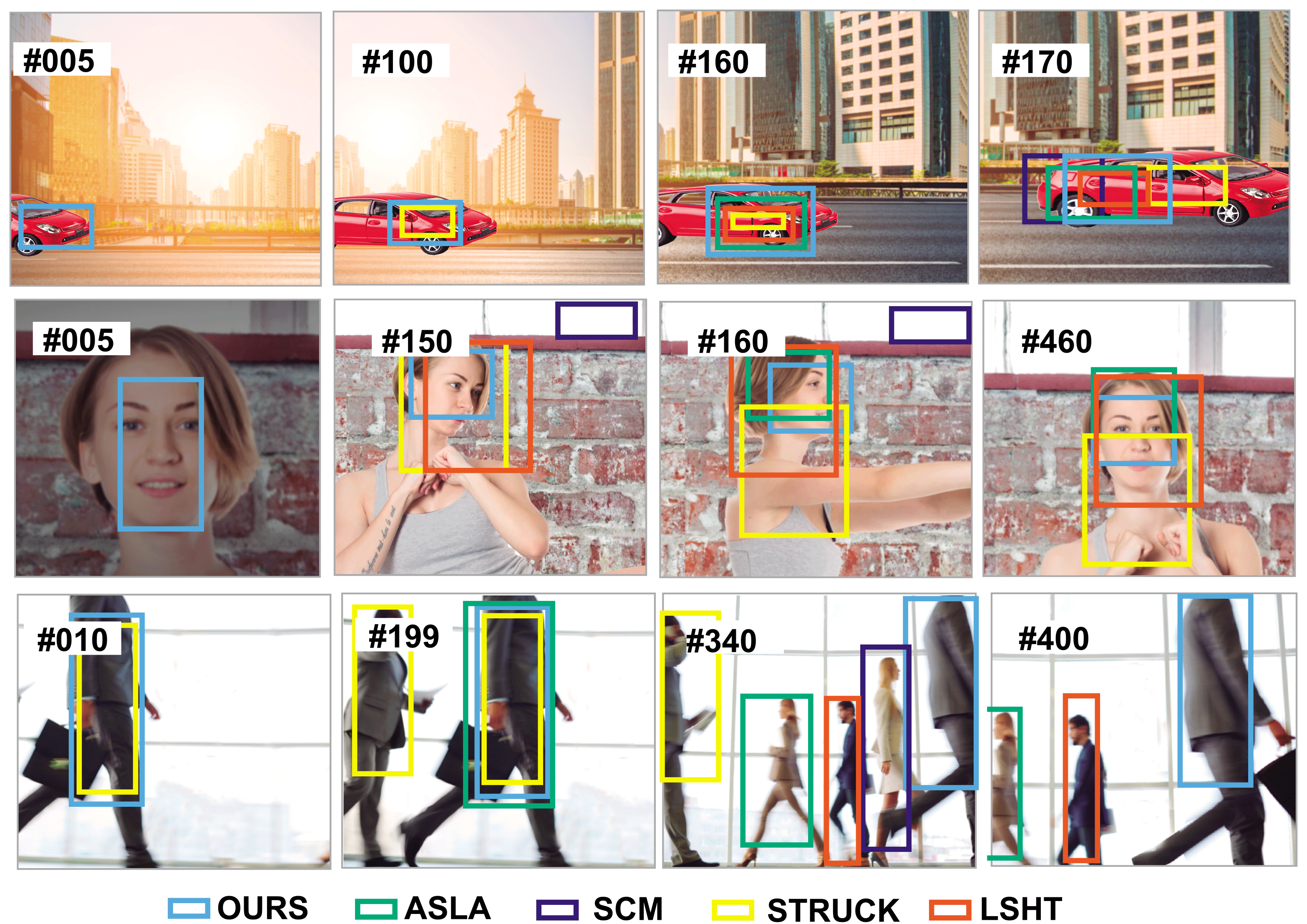
We can find this king of system usually working with two or more cameras and/or different types of vision system, as infrared cameras to see in the darkness. These systems incorporate more than one camera and use the triangulation technique to locate the object to be tracked into the space.
![]()
Since the system knows the object to be tracked, we can find three different methods to implement the tracking; from a pattern, additional identification system as a beacon and systems are able to learn what they must track.
Typical applications for these systems include videogames and video tracking in the AV industry.
Comparison with EM tracking systems
The quality of the motion tracking system is normally related to the tracking technology. For this reason, in this section we will compare Premo solutions, which are based on electromagnetic tracking, with the other tracking technologies explained above.
The main parameters to be considered in a tracking technology are:
![]()
Latency: It can be defined as the time required since the movement is performed until this change is transmitted and processed by the system. Ideally, this time should be instantaneous to offer a more realistic experience. Latency of EM tracking systems is very low because orientation and position are directly sent by the sensor in an analog signal that just needs to be converted into a digital value. By the other hand, a IMU needs more time to calculate the position and the orientation of the tracked unit. Also, visual systems require time due to the computational cost to manage images.
Accuracy: This parameter shows how much reliable is the measure obtained by our system. Obviously the accuracy of the system should be very high for the feedback to show that our system matches the real movement performed by the user. Accuracy is very high in EM systems because the three axes of the transmitter and the sensors devices joined to the sensor provide very reliable spatial data. However, IMU systems require the accumulative error produced and visual systems to be corrected; this error results from reflections brightness and so on.
Range: It indicates how far our system can work. Requirements for this factor depend on the application but a long range is always beneficial for the system and for the user experience, since a long-range system offers more freedom of movement to the user.
Line of sight (LOS): It shows the need of the system to have a direct line of sight between the tracked unit and the tracker. This requirement implies a limitation of the freedom for the user. For example if there’s a wall between the tracked unit and tracker, the system will not detect the movement. Since the electromagnetic field can pass through the obstacles, a LOS is not required between the tracked unit and the tracker. By the other side, visual systems require a LOS.
![]()
Cost: The price of the system depends heavily on the technology and, as usual, the best cost able to cover the needs of the application is also advisable. The product developed by Premo offers a competitive price because the manufacturing cost of the sensor and the transmitter is very low because Premo has mass production lines to produce these device with a very low price. By the other hand, optics and cameras are usually very expensive in visual systems. Also, IMU systems are more expensive than Premo solutions because the cost of sensors and processing units is higher than the ones used in EM tracking systems.

In the table below, a comparison between the different technologies explained is shown considering the key parameters described above:

As can be seen on the table, a Premo solution based on 3DCoilCubesTM and 3DCoilsTM offers very good qualifications when compared with other tracking methods.

EM Motion tracking applications
The most popular application fields for motion tracking systems are certainly virtual reality and augmented reality systems, which are becoming increasingly relevant.
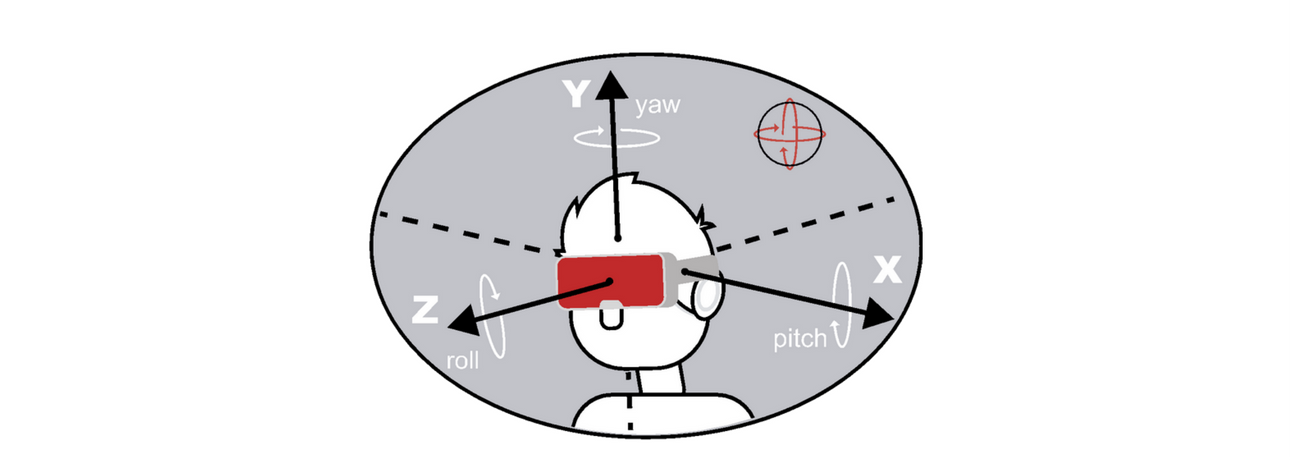
Virtual reality and augmented reality applications are already using EM motion tracking systems incorporating a sensor in the glasses to detect the head movement and show those variations on the screen. These technologies can be applied to a wide range of applications.

Low latency, accuracy and independence of the line of vision provided by EM tracking technology give the user the chance to fully enjoy the virtual reality which with other technology would be more difficult. For this reason, video games companies are incorporating this system in their products, where performance requirements are very relevant.

Besides videogames industry, there are a lot of sectors benefiting from VR/AR systems, as medical, military and so on. Medical sector is implementing these systems to allow the surgeons practice with very real simulations, so the professional is better trained.

There are many more examples of VR/AR systems, but the way they work is very similar. Moreover, we have seen that their performance depend closely on the sensor, which define the accuracy and processing required.
Conclusions
Several motion tracking techniques that are widely applied in current systems from games, security and transport, among others, have been described. The kind of use is closely related to the sensor used because of the different advantages and drawbacks have been described and showed the primacy of motion tracking systems based on electromagnetism regarding the key features required for these systems.
The advantages offered by EM MT systems are being used for AV/RV technologies, which became a key application field for MT systems, so EM MT are gaining relevance since they have and outstanding performance compared with other solutions and are cheaper.
In conclusion, EM MT is becoming a disruptive technology in the MT. Therefore, it will be a key part for technologies using motion tracking, allowing better results and expanding the limits of these systems.












My government customers are very interested in your solution. Where can we get dev kits to experiment with your solution?