Motion tracking has been present in our lives since the 1970s, when they were used for the first time as a photogrammetric analysis tool in researches related to biomechanics. Some examples of these first systems were developed by the Weber brothers [1] in 1936, who established a model for quantitative studies of human locomotion, Marey in 1873 and Muybridge in 1878, who used photographic techniques to quantify patterns of human movement.

In the 1980s, there was a relevant research activity around motion tracking in other fields like education, training, sports and computer animation.
The devices used for motion tracking have not been always as we know them now. While we have seen a very fast evolution on mobile devices in the last decades, this has been the case also for tracking devices. From the first mechanical devices to the current optical and electromagnetic products, they have experienced a great evolution, tending towards highly portable and reliable systems.
WHAT IS TRACKING OR MOTION TRACKING?
Tracking or motion tracking can be defined as the process aiming to capture, follow, and get information about an object’s orientation and position, to be transferred to an application for further processing. This kind of tracking is used in Virtual Reality to control the position of the user, joysticks and other important objects, whereas Augmented reality is used to track the object or market to be augmented and control the user’s position and orientation, for applications in medicine, education, entertainment, sports, military, validation of computer vision, and robotics.
Which devices do we know so far?
The following next shows a possible classification of Motion Tracking Systems [4].

Let’s review each kind of Tracking System, the devices used and the advantages and disadvantages of each of these devices.
Optical Systems
Optical system tracking is based on the information provided by a collection of cameras, connected between them and to a computer, to keep the element in motion tracked within a limited area. These cameras need to be calibrated to obtain a correct and correlated information of their relative position and to get the correct information about the object’s movement. Depending on the elements used to keep track the object in the space, these systems can be classified as:
1. Optical systems with passive marker
These motion tracking systems are based on a set of fixed high-speed cameras, deployed around the effective measurement area, allowing the triangulation of a marker position. In this case, the system uses passive markers, consisting on objects (usually spheres) covered with a reflective material. The infrared lighting allows the capture of images of this reflective material.
For a correct operation, at least two cameras must capture the marker at the same time; otherwise, the marker could not be tracked, most of the times due to some occlusion problems. As the markers are all the same, there is no difference between them, so the device provides a set of unlabeled points in a three-dimensional workspace. A post-processing task is required to identify, classify and provide a meaning to those 3D points in the space. The main problem of these systems is the possible occlusion of the passive markers; by the other hand, the information they provided has an error in the order of sub-millimeter.

2. Optical systems with active markers
These optical systems resemble the previous ones, but the markers are called active markers because they act as a light source instead of being only a reflector. These markers are usually infrared emitting diodes (IREDs). The light emitted by the markers is multiplexed so that the camera speed frequency is divided by the number of sensors that the system need to detect. In these case, the system has a limited measurement frequency, but needs less post-processing time because it is possible to identify each individual marker. Despite this, these optical systems with active markers have the same problem of the previous one, the possible occlusion of the markers and therefore the loss of information in certain conditions.

3. Markerless optical systems
These systems, based on a camera set in a limited area, is an ongoing research with a big potential. The principle of these markerless option is to avoid the use of extra elements in the detection of the object in motion, by means of an analysis based on image capture, segmentation and processing to extract the position of the object to be tracked. It is common to use techniques based on the background subtraction and multiple learning algorithms.
Non-optical Systems
The main element of non-optical systems is not a camera or an optical device. Instead, the object tracking relies on alternative methods and components that allow to recognize, follow and obtain the position of the object in the space. Let’s review the non-optical options available.
1. Electromagnetic systems
These systems are based on electromagnetism theories, which describe the interaction between magnetic fields and electricity. In accordance with this, any current flow generated by a voltage drop across a conductor generates a magnetic field.

Faraday’s Law states than when a receiver sensor moves inside an alternating (AC) magnetic field B (r,T), a voltage proportional to the vector or cross product of the cross sectional winding area and the intensity of the magnetic field, is induced in every winding and generates N times the total voltage across the coils (being N the number of turns of the winding). This induced voltage immediately gives the measurement of rotation (ɵ)vs the reference emitter coils and the position (as the modulus of the resulting vector) in relation with the modulus of the emitting vector (r).


From the information of rotation and position thus obtained, the electromagnetic tracking system can calculate accurately and in real time the object position and orientation in the environment, by means of a three-dimensional system.

For a tracking system, an emitter antenna as base station is required to measure the distance between the object and the base by placing a tracking sensor in each object.
This approach offers advantages thanks to its flexibility to locate the sensor because there are no occlusion issues, and the portability of the system depends only on the transmitter. Conversely, the area is limited to a small region around the transmitter (base station) and the location could be distorted if there are metallic objects in the surrounding space.
2. Mechanical
Mechanical systems were among the first tracking systems ever used. They are based on the direct measurement of the object’s orientation with electromechanical potentiometers. These systems have no external forces or occlusion problems, so results effective in some cases because any of them cannot affect the measurement of the object’s orientation. In addition to this, their operation is quick, and they are portable.
A big disadvantage due to the characteristics of the devices used: they used a more rigid equipment, so it is more difficult to use it in any scenario and to control any motion (as body motion), because in these devices mobility is limited. An additional relevant drawback is that they enable the relative angle between each component of the system to be controlled when placed in the object’s parts, but not if the object is turning, flying or jumping.
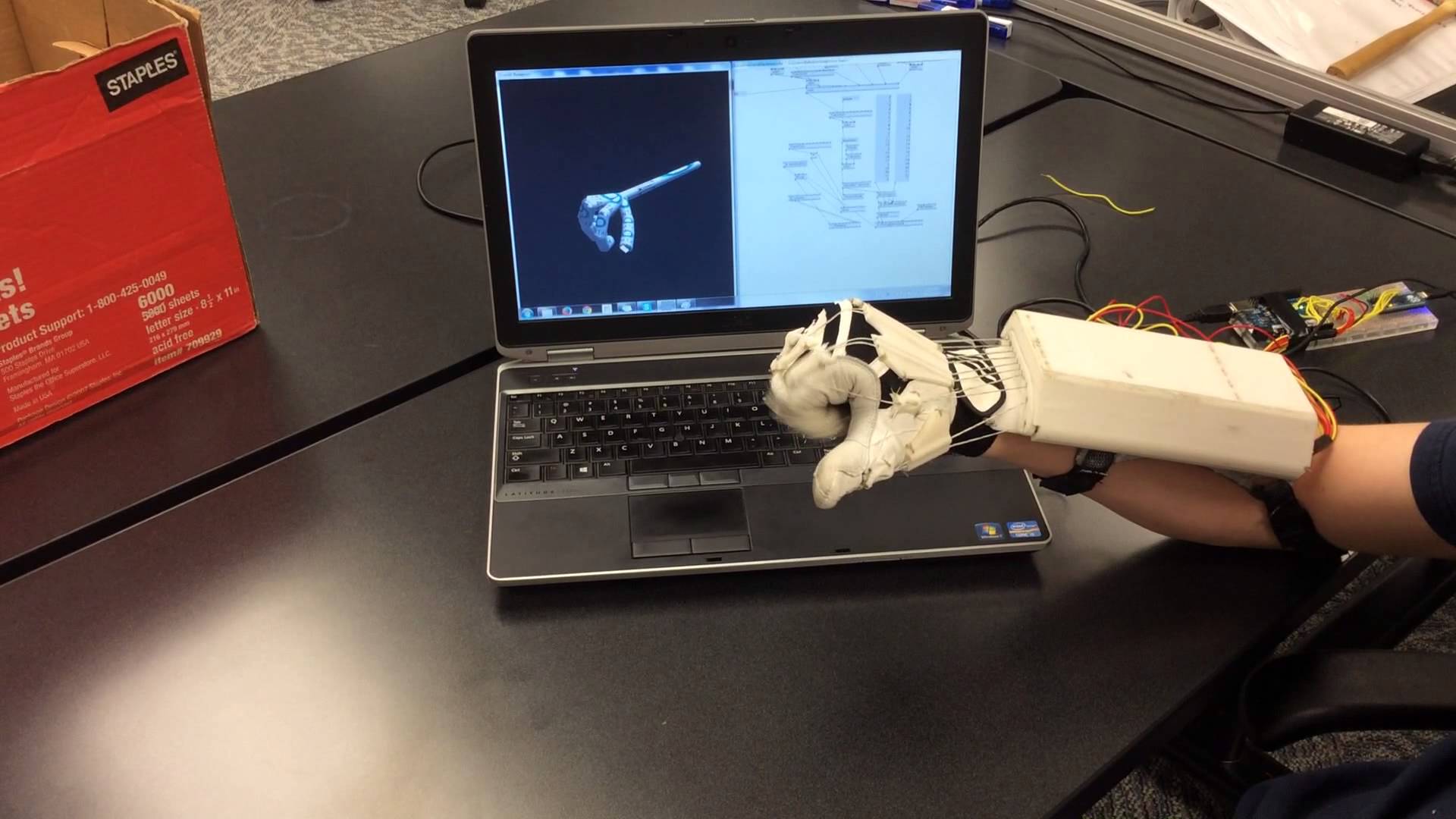
3. Inertial
Inertial tracking devices are based on accelerometers and gyroscopes. The inertial sensor is placed in the object to be tracked to measure its orientation. With estimation techniques, such as Kalman filtering [5], fusing angular rate and tilt (gravity vector) and, with some magnetometers, to get a better heading data. The calculations can introduce a relevant cumulative error, so for a more accurate option some inertial systems combine other tracking devices. Post-processing is also very important and can need extra work in uncertain environments.
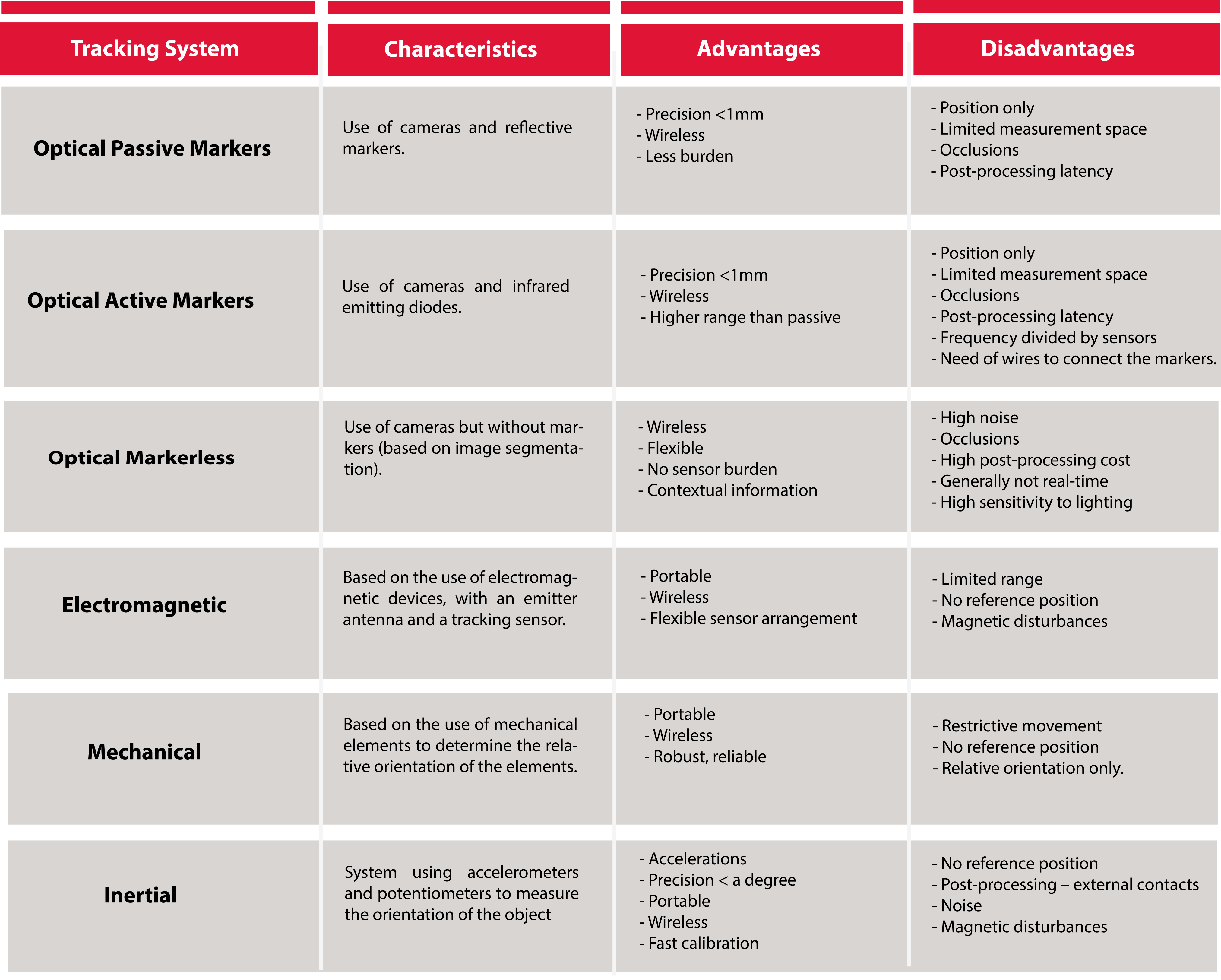
Comparison
The following table provides an overview of tracking systems, their advantages and disadvantages.
Which is the best choice?
As we can see in this post, there are many types of tracking systems and devices used to track and follow the position of an object. There is not a perfect solution and the best choice depends on the application. According to the requirements, a specific system will be selected. The space where the object must move and be tracked, system portability, presence of certain kinds of objects in the tracked space, accuracy, real-time information, among others, are parameters to be considered when selecting of the best option for your application.
With our review of the tracking systems available, we would like to offer a quick view of all the possibilities and options available, to make it easier to select the best choice for your application.
References
[1] Weber W, Weber E: Mechanik der menschlichen Gehwerkzeuge. Göttingen: Dieterich 1836.
[2] Muybridge E: Animal locomotion. Philadelphia: J.B. Lippincott Company; 1887
[3] Marey E: Animal Mechanism: A Treatise on Terrestrial and Aerial Locomotion. London: Henry S. King & Co.; 1874.
[4] M. Field D. Stirling F. Naghdy Z. Pan “Motion capture in robotics review” IEEE International Conference on Control and Automation (ICCA), pp. 1697-1702 Dec. 2009
[5] Roetenberg. Towards a Real-Time Bayesian Imitation System for a Humanoid Robot. 2007 IEEE International Conference on Robotics and Automation, vol., no., pp.2847-2852, 10-14 April 2007.












Hello Firends,
For More Info : http://bit.ly/2y79LU5
In 2017, the global Motion Tracking System market size was million US$ and it is expected to reach million US$ by the end of 2025, with a CAGR of during 2018-2025.